ich habe lange überlegt wie ich dieses lösen kann.
Wichtig war mir dabei die Möglichkeit alles auch digital ansteuern zu können, aber an oberster Stelle stand die absolute Betriebssicherheit.
Deshalb standen für mich bald Servos mit einer Ansteuerung von MBTronik fest.
Schließlich habe ich damit ja schon hervorragende Erfahrungen gemacht.
Dazu habe ich mir dann den benötigten Hub oder Weg ermittelt und habe 3-Gang-Servos gewählt.
Dazu habe ich dann noch den benötigten Durchmesser ermittelt und schließlich alles in die Tat umgesetzt.
Das Ergebnis möchte ich heute vorstellen.

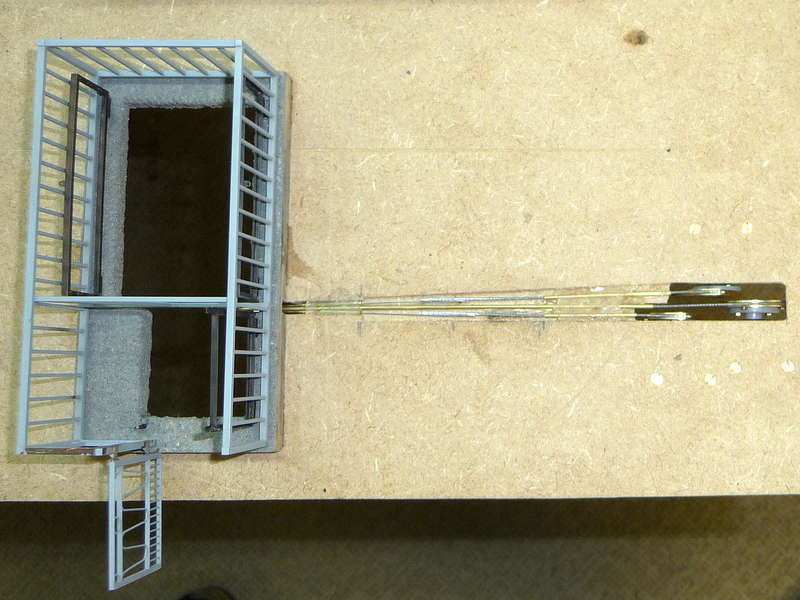
Hubseil-Umlenkung zum Antrieb, denn die Servos liegen unter der Deckplatte.
Damit alles leicht läuft haben alle Umlenkrollen Kugellager.
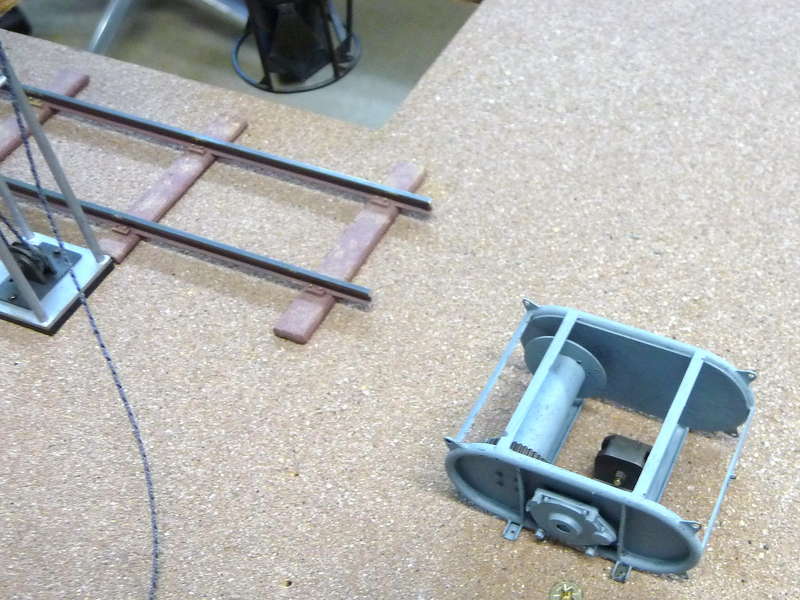
Umlenkung unter die Deckplatte in Winde integriert.
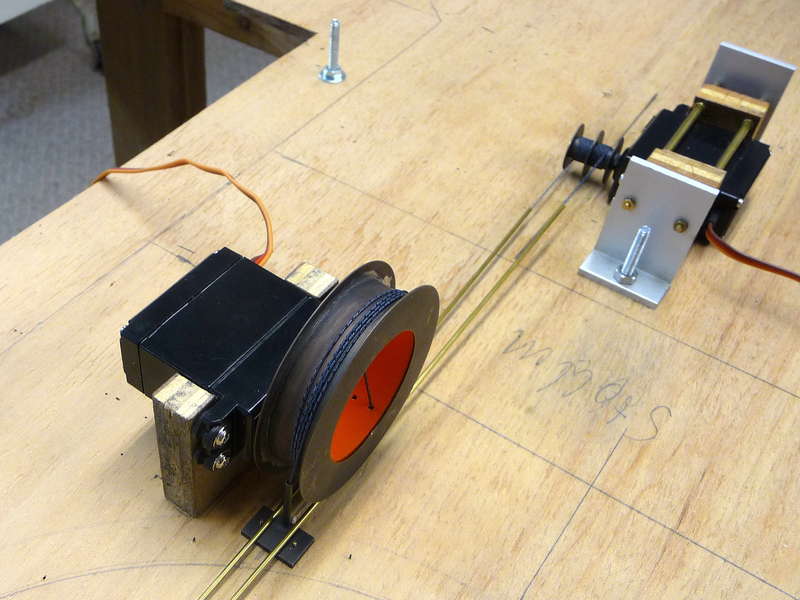
Antrieb links für Winde und rechts für die Laufkatze.

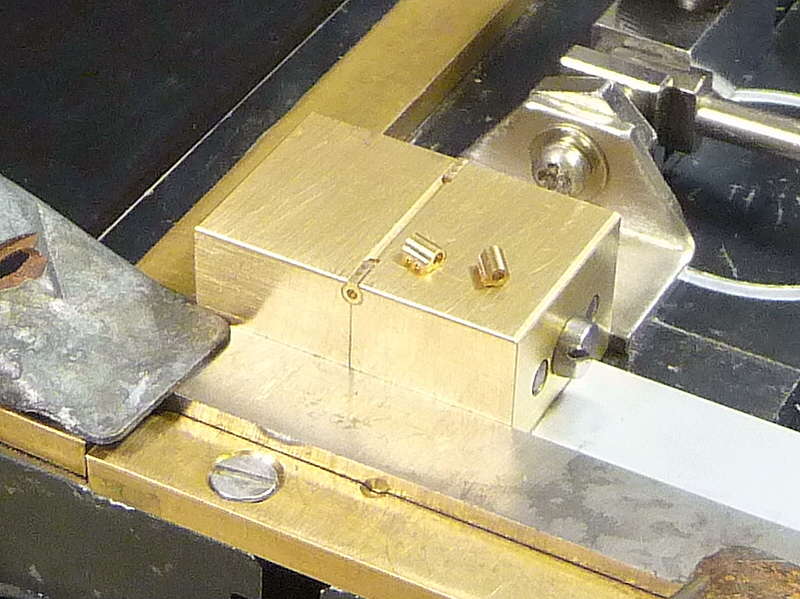
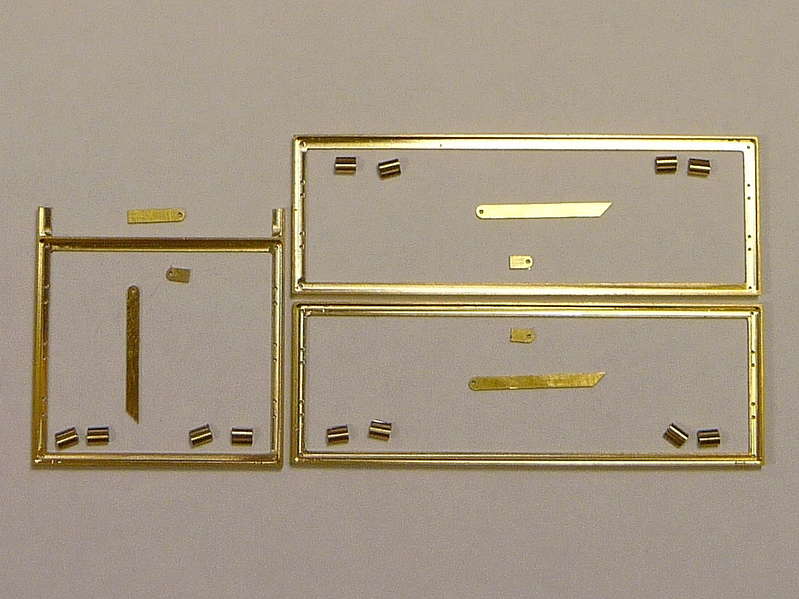
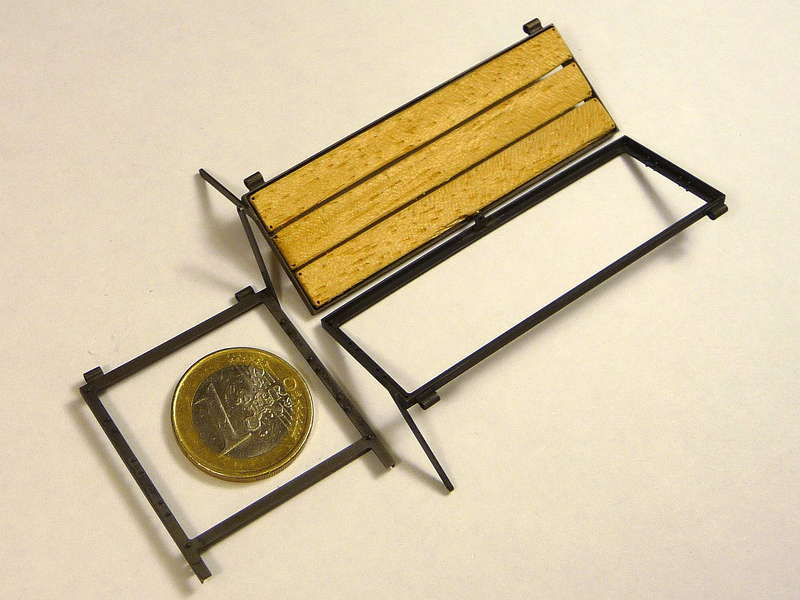
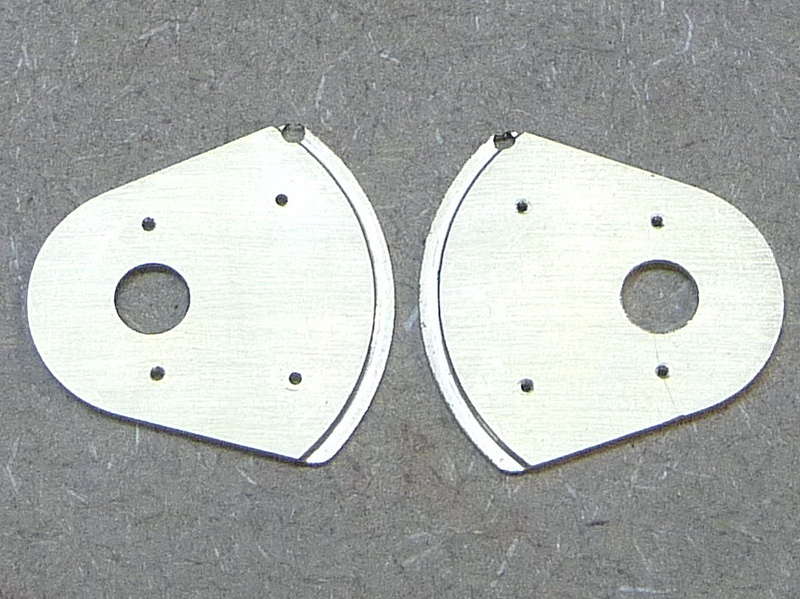
Bauteile für den Laufkatzen-Antrieb.
Ich muss noch etwas Feintuning an der Programmierung machen aber wie ihr in diesem Video sehen könnte läuft alles schon ganz zufriedenstellend.